Решение тяговой задачи
![]()
……………….
![]() .
.
Расчет времени производится по формуле
 .
.
Расчет конкретных кривых движения осуществляется с помощью программы Potyag1.
Определение тока и энергии, потребляемой ЭПС
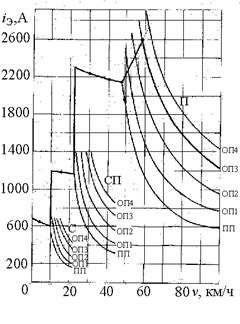
![]() Кривая тока, потребляемого ЭПС
Кривая тока, потребляемого ЭПС ![]() , определяется по токовым характеристикам электровозов
, определяется по токовым характеристикам электровозов ![]() , пример которых для электровоза ВЛ10 приведен на рис 2.3, с помощью тяговой характеристики, приведенной на рис. 2.1.
, пример которых для электровоза ВЛ10 приведен на рис 2.3, с помощью тяговой характеристики, приведенной на рис. 2.1.
![]()
Как видно из рис 2.3, токовые характеристики электровозов представляют собой семейство кривых![]() , подразделенное на группы, обусловленные различными схемами соединения тяговых электродвигателей (П, СП, С). Кроме того, в состав каждой группы входит ряд кривых, относящихся к различным режимам работы ТЭД в плане степени ослабления поля (ПП, ОП1, ОП2, ОП3, ОП4).
, подразделенное на группы, обусловленные различными схемами соединения тяговых электродвигателей (П, СП, С). Кроме того, в состав каждой группы входит ряд кривых, относящихся к различным режимам работы ТЭД в плане степени ослабления поля (ПП, ОП1, ОП2, ОП3, ОП4).
Для выбора одной из этого множества кривых той, на которой в данный момент времени работают ТЭД электровоза, используется тяговые характеристики Fk(v) этого электровоза, приведенные на рис.2.1. Эти характеристики также подразделены на группы и отдельные кривые точно таким же образом и по таким же признакам, как и токовые. Зная в результате ранее проведенных тяговых расчетов мгновенные значения силы тяги ![]() и скорости v в данный момент времени, из множества тяговых характеристик выбирается кривая, на которой располагается точка пересечения этих значений силы тяги
и скорости v в данный момент времени, из множества тяговых характеристик выбирается кривая, на которой располагается точка пересечения этих значений силы тяги ![]() и скорости v. Таким образом определяется схема включения и режим работы ТЭД по ослаблению поля. Затем уже из конкретной токовой характеристики по известному значению скорости движения v для определенных выше схемы соединения ТЭД и коэффициента ослабления его поля, определяется конкретное значение
и скорости v. Таким образом определяется схема включения и режим работы ТЭД по ослаблению поля. Затем уже из конкретной токовой характеристики по известному значению скорости движения v для определенных выше схемы соединения ТЭД и коэффициента ослабления его поля, определяется конкретное значение ![]() в режиме тяги. Находя затем таким же образом токи для всех моментов времени движения ЭПС, строится искомая зависимость
в режиме тяги. Находя затем таким же образом токи для всех моментов времени движения ЭПС, строится искомая зависимость ![]() .
.
Для расчета на ЭВМ токовые характеристики (конкретно для ВЛ10) аппроксимируются следующими зависимостями:
![]() при v < 10 км/ч;
при v < 10 км/ч;
![]() при 10 < v < 22 км/ч;
при 10 < v < 22 км/ч;
![]() при 22
при 22 ![]() v < 46,7 км/ч;
v < 46,7 км/ч;
![]() при 46,7
при 46,7 ![]() v < 48,5 км/ч;
v < 48,5 км/ч;
![]() при 48,5
при 48,5 ![]() v < 52км/ч;
v < 52км/ч;
![]() при 52
при 52 ![]() v < 56км/ч;
v < 56км/ч;
Рекомендуем также:
Грузовые автомобильные перевозки в транспортной системе РФ
Транспорт — одна из важнейших отраслей хозяйства, он обеспечивает потребности населения в перевозках. Специфика транспорта как сферы экономики заключается в том, что он сам не производит новой продукции, а только участвует в ее создании, обеспечивая сырьем, материалами, оборудованием производство ...
Роль грузовых перевозок в коммерческой деятельности
В торговле, как сфере товарного обращения, выполняет большой комплекс различных процессов и операций.
По характеру выполненных в сфере товарного обращения функций процессы и операции, совершаемые в торговле, можно подразделить на два вида;
производственные или технологические;
коммерческие (или ...
Определение
координат центра тяжести судна
Для определения координат центра тяжести судна используют теорему статических моментов весов, которая для определения абсциссы центра тяжести выглядит следующим образом.
где:
,-веса составных частей судна или находящихся на нем грузов
, - абсциссы центра тяжести каждого находящегося на судне ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи