Внешняя неуравновешенность и уравновешивание двигателей
Определение неуравновешенной силы графическим способом.
Разберем этот способ на примере 4-х цилиндрового 2-тактного двигателя. Предположим, что приведенные вращающиеся массы КШМ различных цилиндров различны и составляют MR2 = 0,5 MR1; MR3 = 1,5 MR1; MR4 = MR1. Для данного двигателя Pr2 = 0,5 Pr1; Pr3 = 1,5 Pr1; Pr4 = Pr1.
Принимаем за силу Pr0 силу инерции вращающихся масс первого цилиндра. Тогда безразмерные силы инерции
Pr1 = 1,0; Pr2 = 0,5; Pr3 = 1,5; Pr4 = 1,0;
Направление безразмерных сил инерции соответствует фазовой диаграмме первого порядка (диаграмма заклинки кривошипов). Выполним геометрическое сложение безразмерных сил. Многоугольник не замкнулся; неуравновешенная сила представлена безразмерным главным вектором ![]() и фазовым углом φГ = 45˚.
и фазовым углом φГ = 45˚.
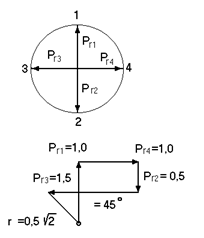
Рис. 8.18 – Графический способ определения rr: а – фазовая диаграмма сил инерции враща-ющихся масс (фазовая диаграмма первого порядка); б-многоугольник сил инерции Pri .
При вращении коленчатого вала многоугольник сил вращается вместе с ним в ту же сторону и с той же угловой скоростью.
Таким образом, для графического определения амплитуды безразмерной силы rr на фазовой диаграмме первого порядка следует указать направление безразмерных сил Pri и cложить эти силы. Замыкающая многоугольника сил представит амплитуду безразмерной неуравновешенной силы. Абсолютное значение неуравновешенной силы находят по формуле
Rr = rr Pr0 = rr MR1 R ω2
Фазовым углом φr будет угол между вектором rr и вертикалью. Максимальное значение проекции неуравновешенной силы как на горизонтальную, так и на вертикальную ось равно Rr.
Если приведенные массы МRi разных цилиндров будут одинаковыми, то многоугольник замкнется и, следовательно, силы инерции вращающихся масс уравновесятся. При равномерной заклинке кривошипов и одинаковой величине вращающихся масс различных КШМ, как правили силы инерции вращающихся масс оказываются уравновешенными (за исключением 4-тактного 2-х цилиндрового ДВС).
Определение неуравновешенной силы Rr аналитическим способом
Для аналитического определения неуравновешенной силы используем формулы (при α1 = 0)
 ,
,  ,
,
или в безразмерном виде
 ;
;  .
.
Углы βi определяют по фазовой диаграмме первого порядка.
Расчет неуравновешенной безразмерной силы проводим в табличной форме
|
Номер КШМ |
βi |
cos βi |
sin βi |
pri |
pricos βi |
prisin βi |
|
1 2 3 4 |
0 180 90 270 |
1,0 -1,0 0 0 |
0 0 1,0 -1,0 |
1,0 0,5 1,5 1,0 ∑ |
1,0 -0,5 0 0 rr В = 0,5 |
0 0 1,5 -1,0 rr Г = 0,5 |
|
| ||||||
Абсолютная неуравновешенная сила
Rr = rr Pr0 = rr MR1 R ω2.
Определение неуравновешенных моментов графическим способом
Рассмотрим схему коленчатого вала 2-тактного 4-х цилиндрового двигателя.
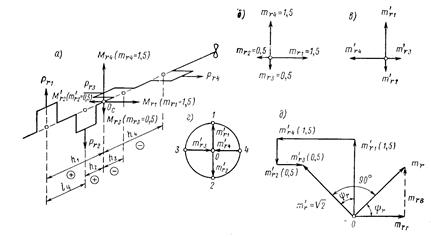
Рис. 8.19 – Графическое определение неуравновешенного момента: а – схема коленвала; б – направление действительных безразмерных моментов; в – направление повернутых безразмерных моментов; г – совмещение повернутых безразмерных моментов с фазовой диаграммой первого порядка; д – многоугольник моментов.
Рекомендуем также:
Ежедневное обслуживание автомобиля. Этапы
Визуальный осмотр
Ежедневный осмотр и проверка автомобиля, своевременный ремонт и техническое обслуживание — гарантия вашей безопасности. Ежедневный осмотр автомобиля поможет исключить многие неудобства во время управления автомобилем, а так же предотвратит многие поломки автомобиля, во время его ...
Расчет трудоемкости ТО и ТР ПС
Расчет трудоемкости второго технического обслуживания (ТО - 2)
Трудоемкость ТО - 2 определяется по формуле:
ТТО-2 = NТО-2 * HТО-2 * К2 * К5 , ( чел/ч.) (1.8)
где HТО-2 – норматив трудоемкости одного ТО-2, чел / ч.;
К2- коэффициент корректирования нормативной трудоемкости по ТО и текущему ремон ...
Краски, эмали
и другие материалы. Маркировка лакокрасочных материалов
Лакокрасочные материалы имеют две основные функции: декоративную и защитную. Они защищают дерево от гниения, металл - от коррозии, образуют твердые защитные пленки, предохраняющие изделия от разрушающего влияния атмосферы и других воздействий и удлиняющие срок их службы, при этом придают изделиям ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи