Внешняя неуравновешенность и уравновешивание двигателей
Главный вектор неуравновешенных вращающихся масс, равный геометрической сумме векторов ![]() ,
, ![]() ,
, ![]() и
и ![]()
![]()
будет вращаться вместе с коленчатым валом с угловой скоростью ω. При любом положении коленвала проекциями этого вектора на вертикальную и горизонтальную ось будут RrВ и RrГ. Следовательно, численное значение главного вектора неуравновешенных вращающихся масс можно определить из выражения
![]()
Если определены проекции главного вектора Rr при положении коленчатого вала, кргда его первый кривошип находится в своей ВМТ, то угол между главным вектором и вертикальной осью φr
Справедливо и обратное: для произвольного положения коленчатого вала, определяемого углом αi, проекции главного вектора на вертикальную и горизонтальную оси можно найти по уравнениям
RrВ = Rr cos (α1 +φr) RrГ = Rr sin (α1 +φr).
Несколько иначе обстоит дело с неуравновешенными моментами от сил инерции вращающихся масс. Как известно, момент P·a сил ![]() , действующих в плоскости ЕЕ, можно представить вектором
, действующих в плоскости ЕЕ, можно представить вектором ![]() , перпендикулярным к плоскости ЕЕ. Длина вектора
, перпендикулярным к плоскости ЕЕ. Длина вектора ![]() соответствует в выбранном масштабе величине момента. Вектор
соответствует в выбранном масштабе величине момента. Вектор ![]() направлен в ту сторону, откуда пара сил
направлен в ту сторону, откуда пара сил ![]() представляется действующей по часовой стрелке. В соответствии с этим вектор момента от силы PriВ направлен горизонтально, а вектор момента от силы PriГ - вертикально.
представляется действующей по часовой стрелке. В соответствии с этим вектор момента от силы PriВ направлен горизонтально, а вектор момента от силы PriГ - вертикально.
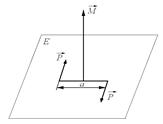
Рис. 8.16 – Вектор изображения момента пары сил
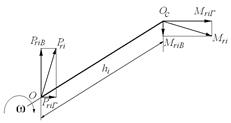
Рис. 8.17 – Схема моментов неуравновешенных вращающихся масс цилиндра
Момент от силы Pri
![]() .
.
Соответственно
 .
.
Обозначим через ψr угол между результирующим вектором момента Mr и горизонтальной осью. Для главного вектора сил инерции вращающихся масс по аналогии получим
![]() ,
,
 ;
;
Таким образом
 ,
,
откуда непосредственно следует
Mr Г = Мr cos (α1 + ψr);
Mr В = Мr sin (α1 + ψr),
где ψr - начальная фаза момента.
В дальнейшем будем определять ψr для положения коленчатого вала при α1 = 0.
Для сил и моментов сил инерции ПДМ первого и второго порядков получим соответственно:
![]() ;
; ![]() ;
;
 ;
;  ;
;
R1Д = RI cos (α1 + φ1); M1Д = MI cos (α1 + φ1);
![]() ;
; ![]() ;
;
 ;
;  ;
;
R1IД = RII cos (α1 + φ1I); M1IД = MII cos (α1 + φ1I).
Лекция 16. 8.4.2. Определение неуравновешенных сил и моментов от системы сил инерции вращающихся масс
Неуравновешенные силы и моменты принято определять при положении коленчатого вала, когда кривошип первого цилиндра находится в ВМТ.
Рекомендуем также:
Документальное оформление перевозки
Экспорт:
Железнодорожная накладная прибывает с грузом и передается в ТЭЦ порта
На основании данных ж/д накладной в ТЭЦ заполняется КУЭГ в разделе "числится по документам"
КУЭГ передается на склад, на который будет выгружаться груз
На основании тальманского учета весовщика ж/д и тальм ...
Компоновка и настройка технических средств регулирования
Одним из распространённых устройств для реализации систем координированного регулирования на городских магистралях с небольшим числом перекрёстков ( до 6 ) является упрощённый контролер УК-2, имеющий следующие режимы работы:
- «Ш»- «Программа 1»- основная суточная программа при двухфазной или трё ...
Выбор режима работы производственных подразделений
Зона ЕО работает совместно с другими зонами, так как, например, при ТО-1 или при ТО-2 вначале надо пройти ежедневное обслуживание, поэтому работу зона ЕО начинает с 15.00 до 24.00 ч. Рабочий день эксплуатации автомобильного парка начинается с 7.00 до 16.00 ч. Но автомобили приезжают в парк постепе ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи