Активная безопасность автотранспортных средств
Активная безопасность (АБ) комплекса ЧАДС (человек – автомобиль – дорога – среда движения) в настоящее время имеет приоритетное значение при анализе безопасности дорожного движения (БДД) вообще. Зарубежные и отечественные исследования [14] в области увеличения эффективности системы обеспечения АБ находятся в настоящее время на подъеме, а активно разрабатываемый в странах с развитой автомобильной промышленной индустрией комплексный подход задаёт новые направления её дальнейшего развития.
Для того чтобы аргументированно отметить некоторые современные направления и тенденции в области повышения АБ, обратимся к истории возникновения понятия АБ и воспользуемся анализом работ зарубежных авторов, выполненным под руководством автора аспирантом В.В. Карповым [76]. Рассмотрим два различных подхода к анализу проблемы обеспечения БДД и на их основе выделим основные возможности в повышении системы АБ, которые позволяют значительно увеличить БДД.
Классическое определение БДД было предложено Wilfert в 1966 г. (рис. 5.9). Он впервые предложил разделить безопасность транспортных средств (ТС) на активную и пассивную. Новым было выделение в составе АБ четырёх категорий: безопасность вождения, безопасность среды вождения, перцепционная безопасность и безопасное управление. И несмотря на достаточно непривычные классификационные пункты (в обычной классификации – тормозные и тягово-скоростные свойства, управляемость, устойчивость, информативность автомобиля) в данной схеме отчётливо усматриваются близкие взаимодействия между дорогой, ТС и водителем, т.к. уже в то время в полной мере ощущалась необходимость комплексного подхода. Однако основная фокусировка внимания направлялась всё же на обеспечение непосредственно АБ ТС.
Активная безопасность автомобиля в настоящее время (и, вероятнее всего, ещё довольно долго) будет лишь лимитирующим фактором, но не главным в обеспечении БДД. Подобная расстановка приоритетов являлась следствием первичной и исключительной ответственности водителя за безопасность процесса вождения. Таким образом, для учёных и инженеров-автомобилистов долгое время ещё будет существовать только одна установка: сделать всё возможное, чтобы обеспечить максимальные возможности для водителя в его проблеме безопасного вождения.
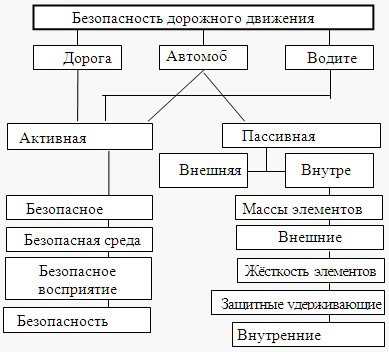
Рис. 5.9 Классификация БДД (Wilfert)
Несмотря на высокие темпы развития информационно-вычислительной технологии, которая могла бы выполнять функции по управлению ТС с гораздо большей надёжностью, чем человек, подобное невозможно в современном обществе. Это обусловлено, прежде всего, моральным конфликтом возможности передачи ответственности за свою жизнь и жизнь окружающих людей искусственному интеллекту. В авиационной или ядерной отраслях рассматриваемый шаг был уже давно сделан и является весьма успешным, однако это происходит ввиду того, что эти отрасли обслуживаются очень немногочисленным и высокопрофессиональным сообществом. Когда же мы говорим о дорожном движении, то необходимо учитывать, что в данный процесс будет вовлечён практически каждый человек. Поэтому, чтобы иметь лучшее представление о характере взаимодействий в подсистеме «водитель-автомобиль» и их причинной обусловленности, обратимся к трёхуровневой структуре системы поведения человека при управлении ТС, впервые предложенной Rasmussen (рис. 5.10).
Поскольку вождение относится к направленно-ориентированной сенсомоторной деятельности человека, то Rasmussen подразделяет её на три поведенческие категории: поведение, основанное на знании; поведение, обусловленное некоторыми правилами; и поведение, опирающееся на имеющиеся навыки. На первом уровне водитель вынужден анализировать различные поведенческие альтернативы, выбирая из них наиболее, на его взгляд, подходящие.
Рекомендуем также:
Винтовая характеристика
Главные судовые двигатели обычно нагружаются гребным винтом. Поэтому для любого режима плавания мощность, развиваемая двигателем будет определяться мощностью, потребляемой гребным винтом.
Винтовой характеристикой называется зависимости параметров работы двигателя нагружаемого гребным винтом от ча ...
Мощность двигателя
Работа, совершаемая газами во всех цилиндрах за единицу времени, называется индикаторной мощностью двигателя .
При выводе формулы мощности приняты следующие обозначения:
D —диаметр цилиндра, м; S — ход поршня, м; Vs — рабочий объем цилиндра, м3; pt — среднее индикаторное давление; п — частота в ...
Выбор материалов и допускаемых напряжений
Так как крутящий момент ведомого вала равняется Т2=140[Нм], то целесообразнее всего цементация стали.
Для изготовления зубчатых колес выбираем сталь марки 25ХГТ. После термообработки, твердость шестерни составит около 610 НВ, а твердость колеса - около 570 НВ.
Допускаемые контактные напряжения: ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи