Активная безопасность автотранспортных средств
Основное время занимает умственный процесс обработки имеющихся опытных или теоретических знаний, а после этого выбранный вариант переносится на действия посредством моторных реакций. Второй уровень отличен тем, что на нём водитель уже обладает набором некоторых правил поведения в данной дорожной ситуации, т.к. подобные ситуативно-ассоциативные условия уже довольно часто происходили ранее. Поведение человека на третьем уровне характеризуется рефлекторными, ответными на определённые стимулирующие воздействия реакциями. Очевидно, что третий уровень является наиболее эффективной формой поведения человека в условиях ограниченного времени.
Совершенно ясно, что основными направлениями работы по улучшению безопасности движения являются, если говорить в терминологии описываемого подхода, минимизация ситуаций, вызывающих первый поведенческий уровень, оптимизация второго уровня решения задачи управления ТС и обеспечение максимальной эффективности и надёжности стабилизирующего воздействия со стороны водителя на третьем уровне. Решение первой из указанных задач лежит в области повышения квалификации водителей, а также разработки различных навигационных систем, помогающих выбрать наилучший маршрут движения.
Оптимизация управленческого уровня задачи вождения имеет огромное значение для безопасности движения. На данном уровне человек наделён чрезвычайно важной способностью упреждающе интерпретировать развитие дорожной ситуации, т.е. заранее выбирать необходимые параметры движения, чтобы компенсировать время запаздывания, заранее присущее описываемой системе. Основные направления приложения усилий видятся в разработке систем информационного обеспечения водителя, систем предупреждения от различного рода опасностей, а также рекомендаций необходимых действий в сложившейся ситуации. На уровне стабилизации водитель как субъект управления и ТС как объект составляют хорошо известную и тесно связанную динамическую систему. Важная задача развития этого блока состоит в том, чтобы избежать любого сбоя (непредсказуемых изменений динамики ТС) во взаимодействии между водителем и ТС.
 |
Перед тем как подробнее остановиться на указанных выше системах, рассмотрим ещё один подход к изучению проблемы БДД. Очевидно, что одним из наиболее объективных параметров для оценки БДД является относительный показатель количества ДТП за некоторый промежуток времени. Если рассматривать макроскопический подход к причинному анализу возникновения ДТП, который опирается на том положении, что существуют так называемые «очаги ДТП» или критические точки на улично-дорожной сети, где по статистике вероятность возникновения ДТП наибольшая, то проблема сокращения их количества лежит в области рациональной организации дорожного движения.
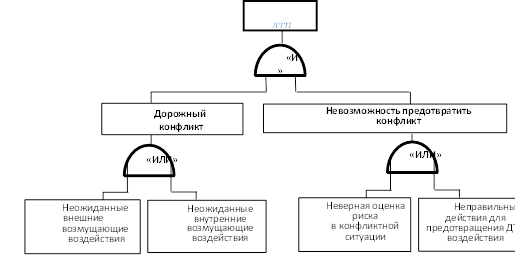
Рис. 5.11 Дерево причинной обусловленности ДТП
С точки зрения микроскопического подхода, существует множество конфликтных ситуаций и при нормальном невозмущённом движении транспорта. Подход основан на анализе процессов, происходящих в отдельной, единичной системе «водитель – ТС – окружающая среда движения», который производится при помощи так называемого «дерева причин ДТП» (рис. 5.11).
Рекомендуем также:
Разработка четырехнедельного нормированного плана-графика технического
обслуживания устройств
Основой работы технического штата дистанции сигнализации, централизации и блокировки является выполнение процесса технического обслуживания устройств. Этот процесс предусматривает регулярную периодическую проверку устройств, аппаратуры, линий AT и т.п. в соответствии их установленным нормам и допу ...
Определяем среднее время
простоя местного вагона
(3.3)
где - среднее время простоя местного вагона;
- количество местных вагонов;
-время простоя каждого местного вагона в отдельности;
=20 (часов). ...
Организация диагностирования автомобилей
Автомобиль, по прибытии на КТП, проходит технический осмотр. При этом проверяется общее состояние автомобиля, комплектность и фиксируется информация водителей о неисправностях, выявленных во время выполнения транспортных работ [3].
После выполнения уборочно-моечных работ (ЕО) автомобили направляю ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи