Активная безопасность автотранспортных средств
Не приводя дословно определение ДТП, а лишь указав первые два блока, способствующие его возникновению, можно заметить отличие ДТП от конфликтной ситуации, которая является лишь одним из условий возникновения ДТП. Второе обязательное условие возникновения ДТП заключается в неправильном поведении водителя в конфликтной ситуации. Эти два блока связаны логической операцией «И», т.е. для возникновения ДТП необходимо одновременное выполнение обоих условий. Появление конфликтной ситуации может быть обусловлено как помехами внутри ТС (например, неадекватные опасные управляющие воздействия, неумышленно произведённые самим водителем, или поломки в некоторых системах автомобиля), так и снаружи ТС (внезапно изменяющиеся характеристики дороги или непредвиденное поведение других участников движения). При этом происходит крайне негативный процесс изменения поведения водителя с третьего уровня на первый.
Предотвратить появление подобных ситуаций возможно только введением полностью автоматизированного решения задачи управления, исключив из неё человека, что на современном этапе пока недостижимо в силу приведённых ранее причин. Рассматривая проблемы повышения БДД с позиций данного подхода, мы снова приходим к необходимости разработки систем, которые позволят либо нейтрализовать избыточное управляющее воздействие, либо даже осуществить коррекцию недостаточных управляющих действий водителя.
Подобные системы будут связаны с соответствующими блоками низшего уровня «дерева» логической операцией «И», а следовательно, значительно сократят вероятность возникновения ДТП (рис. 5.12), т.к. при их наличии для реализации предпосылок ДТП необходимо не только одно из неправильных управляющих воздействий, но и одновременный с ним отказ системы, отвечающей за оптимизацию и контроль данных воздействий.
В истории развития этих систем система ABS была первой. Она ограничивала тормозное усилие, задаваемое управляющим воздействием водителя таким образом, чтобы была реализована максимальная сила сцепления, при которой торможение наиболее эффективно. Аналогично система автоматического контроля буксования (ASC) ограничивает чрезмерный входной сигнал со стороны водителя в момент нажатия его на педаль газа.
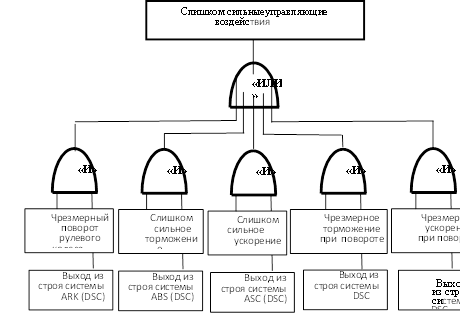
Рис. 5.12. Оптимизированная ветвь дерева причин ДТП «Избыточные (недостаточные) управляющие воздействия»
В системе активной кинематики задней подвески на ВМW реализован режим управления задними колёсами (ARK) таким образом, что она управляет поддержанием боковой устойчивости при движении автомобиля даже при экстремальных входных управляющих воздействиях. Это достигается путём перераспределения боковых усилий, воздействующих на переднюю и заднюю оси. И, наконец, система контроля динамической устойчивости (DSC) представляет собой комплексное решение для всех эксплуатационных режимов и почти всех видов предельных манёвров.
Важно отметить, что функционирование данных систем не вступает в прямой конфликт с управленческой ролью человека как субъекта управления, о котором было сказано выше, т.к. они фактически приводят к оптимальным параметрам управляющего воздействия, а именно этого и пытается достичь водитель. В качестве примеров практического решения приведём системы, оптимизирующие параметры управляемости и устойчивости ТС – важных показателей АБ ТС. Одним из показателей управляемости и устойчивости ТС при его манёврах на повороте является контроль бокового и поворачивающего смещения ТС относительно плоскости дороги, который осуществляется водителями ТС лишь применением управляющих воздействий к передним колёсам. Зачастую подобного контроля с единственной степенью свободы бывает недостаточно и для управления боковым смещением, и для необходимой ориентации продольной оси ТС в дорожных условиях постоянно изменяющегося маршрута движения. При этом водитель фактически не имеет никакой возможности контролировать негативное явление крена кузова.
Рекомендуем также:
Расчетные зависимости для кинематического исследования механизма
К кинематическим характеристикам рычажных механизмов относятся траектории точек, координаты, перемещения, скорости и ускорения точек и звеньев, а также функции положения, аналоги (или КПФ) скоростей и ускорений точек и звеньев механизма. Значение кинематических параметров механизмов необходимо для ...
Внутренний водный транспорт
Водный транспорт делится на два вида: внутренний водный транспорт и морской транспорт.
Внутренний водный транспорт (он же - речной) относится к одному из древнейших видов транспорта. Россия обладает большой и разветвленной сетью речных путей и озер. Однако существенную роль он играет либо в тех р ...
Расчет численности производственных рабочих
При расчете численности производственного персонала различают явочное или технологически необходимое – Рт и Рш число исполнителей.
Явочное число рабочих (число рабочих мест).
Рт = Т1/Фрм , (55)
где Рт – число рабочих мест;
Т1 – годовой объем работ (трудоемкость);
Фрм – годовой фонд времени ра ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи