Классификация по узлам и механизмам
По типу механических передач (приводов рабочего оборудования) одноковшовые экскаваторы бывают: с групповым механическим канатным приводом (механические), с индивидуальным электрическим приводом лебедок (электромеханические) и экскаваторы с гидравлическим приводом.
У первого типа экскаваторов тяговое усилие к рабочим органам передается посредством канатов (или цепей), движимых лебедками. Привод лебедок осуществляется от двигателя экскаватора посредством механических передач (зубчатых, цепных, фрикционных, червячных).
Универсальный экскаватор с механическим приводом оборудуется трехбарабанной лебедкой. Стреловой барабан лебедки используется для привода (подъема и опускания) стрелы. Подъемный барабан используется для подъема ковша (или возврата рукояти при работе обратной лопатой). Тяговый барабан используется для подтягивания ковша к экскаватору (при работе драглайном, обратной лопатой). При работе прямой лопатой тяговый барабан связан с механизмом напора рукояти.
Механический канатный привод широко применялся на экскаваторах в прошлом. В современных моделях его применение сокращается.
У экскаваторов с индивидуальным электрическим приводом лебедок (электромеханические) тяговое усилие к рабочим органам передается посредством канатов (или цепей), движимых лебедками. Привод каждой лебедки и вспомогательных механизмов осуществляется индивидуальным электрическим двигателем. Такой привод применяется на тяжелых карьерных (в том числе и шагающих) и промышленных экскаваторах.
В экскаваторах с гидравлическим приводом (гидравлические экскаваторы) усилие на элементах рабочего оборудования создается гидроцилиндрами и гиродвигателями. Двигатель экскаватора приводит во вращение гидравлический насос, создающий давление рабочей жидкости в гидросистеме.
Через систему гидрораспределителей полости гидроцилиндров (гидродвигателей) соединяются с напорной или сливной магистралями гидросистемы, что обеспечивает перемещение рабочего оборудования. В нейтральном положении (при запертых полостях гидроцилиндров) положение рабочего оборудования фиксируется. В настоящее время гидравлические экскаваторы имеют преимущественное распространение.
Так как одноковшовые экскаваторы являются универсальными машинами, то в зависимости от характера выполняемых работ и условий их ведения применяются следующие виды рабочего оборудования:
а) прямая лопата – для разработки грунтов, расположенных выше уровня стоянки экскаватора;
б) обратная лопата – для разработки грунтов, находящихся ниже уровня стоянки экскаватора (применяется преимущественно для рытья небольших котлованов и траншей);
в) драглайн – для разработки грунтов, расположенных ниже уровня стоянки экскаватора (применяется при рытье глубоких котлованов и широких траншей, при возведении насыпей, на вскрышных и других работах);
г) грейфер для рытья колодцев, узких и глубоких котлованов;
д) струг – для планировочных работ в специфических условиях (когда невозможно применить более производительные землеройно-транспортные машины);
е) скребок-засыпатель на стреле струга;
ж) засыпатель на стреле драглайна;
з) копер для забивки свай;
и) дизель-молот для разработки мерзлых грунтов;
к) корчеватель пней.
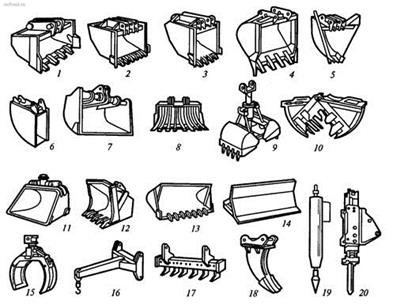
Рисунок 6. – Виды рабочего оборудования одноковшовых экскаваторов
Кроме перечисленного оборудования на экскаваторах используют крановое оборудование, трамбующие плиты, клиновые и шаровые рыхлители для разрушения мерзлых грунтов или для разделки негабаритного камня в карьерах.
Рекомендуем также:
Приливные явления
Учитывая то, что величины приливоотливных явлений на всей акватории Чёрного моря, незначительны, расчёт приливов выполняется только для портов назначения на 5 суток планируемой стоянки. Время наступления полных и малых вод и их высоты для основных и дополнительных пунктов определяются по таблицам ...
Порядок перевозки опасных грузов
Порядок перевозки опасных грузов регламентируются Федеральными авиационными правилами "Правила перевозки опасных грузов воздушными судами гражданской авиации", которые разработаны в соответствии со статьей 113 Федерального закона от 19 марта 1997 г. N 60-ФЗ "Воздушный кодекс Российс ...
Расчет опасных напряжений при электрическом влиянии
Электрическое влияние на линию связи обусловлено наличием в контактной сети переменного напряжения, создающего в окружающее пространстве переменное электрическое поле. Между влияющим проводом 1 контактной подвески (рис. 2) и проводов связи 2 имеется емкостная связь С1-2 и каждый из этих проводов и ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи