Расчет тягового баланса автомобиля
По рассчитанным значениям РТ и V строим график изменения силы тяги на ведущих колесах автомобиля в зависимости от его скорости движения. Пример графика приведен на рисунке-3.
Для построения графика зависимости силы сопротивления дороги РΨ от скорости движения автомобиля V используется формула
РΨ= mg [Н],
где Ψ - коэффициент сопротивления дороги (Ψ = i+ƒ);
i - уклон дороги; при движении автомобиля по горизонтальной дороге i =0;
ƒ - коэффициент сопротивления дороги; для дорог с асфальтобетонным покрытием значения коэффициента определяются по формуле
Таким образом, формула для определения силы сопротивления дороги РΨ приобретает вид формулы-15
 , (15)
, (15)
Сила сопротивления воздуха РW движению автомобиля определяется по формуле-16
 , (16)
, (16)
где k и F-коэффициент обтекаемости автомобиля и лобовая площадь автомобиля соответственно, значения которых принимались ранее в п.1.2.1
Так как и сила сопротивления дороги РΨ и сила сопротивления воздуха РW зависят от изменения скорости автомобиля, то задаваясь 5-ю![]() 6-ю различными значениями скорости V (предпочтительны значения скоростей из таблицы 2, развиваемые на различных передачах) подсчитываем значения сил сопротивления движению для этих значений скорости. Результаты расчета представляем в виде таблицы-6.
6-ю различными значениями скорости V (предпочтительны значения скоростей из таблицы 2, развиваемые на различных передачах) подсчитываем значения сил сопротивления движению для этих значений скорости. Результаты расчета представляем в виде таблицы-6.
Таблица 6 - Расчет сил сопротивления движению проектируемого автомобиля по горизонтальной дороге с асфальтобетонным покрытием.
|
V, км/ч |
2,6 |
15,5 |
29,2 |
52,2 |
85 |
99 |
|
РΨ, Н |
1051,1 |
1064 |
1096 |
1194,2 |
1431 |
1566 |
|
РW, Н |
1,07 |
38,1 |
135,1 |
432 |
1145 |
1553,1 |
По рассчитанным значениям сил РΨ и РW строим кривую зависимости суммарной силы сопротивления движению автомобиля РΨ + РW от скорости движения автомобиля для чего:
строим кривую зависимости силы сопротивления дороги РΨ от скорости V;
от точек кривой РΨ =ƒ(V) откладываем ординаты кривой РW =ƒ(V) и после соединения точек плавной линией получаем кривую РΨ + РW =ƒ(V).
Нанесенные на одном графике кривые РТ =ƒ(V), РΨ =ƒ(V) и РΨ + РW =ƒ(V) представляют собой графическое решение уравнения тягового баланса проектируемого автомобиля.
На графике, в точке оси V, соответствующей максимальной скорости движения автомобиля Vmax, должно быть либо РТ = РΨ + РW (кривые пересекаются), либо РТ > РΨ + РW (кривая РТ проходит выше РΨ + РW). Пример графика тягового баланса автомобиля приведен на рисунке 3.
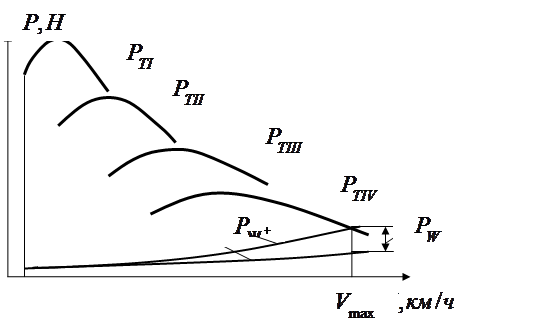
Рисунок 3 - График тягового баланса проектируемого автомобиля.
Рекомендуем также:
Гидроусилитель с соплом и заслонкой
.
Рис.5. Схема гидроусилителя типа сопло-заслонка
Гидроусилитель типа сопло-заслонка показан схематически на рис. 5. состоит из сопел 1 и 4, которые вместе с подвижной заслонкой 2 образуют два регулируемых щелевых дросселя, и нерегулируемых дросселей 5 и 12, установленных на пути подвода жидкос ...
Расчет годовой трудоемкости текущего ремонта
Корректирование удельной трудоемкости текущего ремонта (ТР).
Корректирование выполняем по формуле:
tтр = tтрн · К1 · К2 · К3 · К4ср · К5, чел.ч/1000 км (48)
где: tтр – скорректированная удельная трудоемкость ТР.
tтрн – нормативная удельная трудоемкость ТР.
К1-5 – коэффициенты корректирования. ...
Подбор карт, руководств, пособий
Согласно РШСУ-98, подбор навигационных морских карт, пособий, руководств на предстоящий переход (рейс) выполняется по каталогу карт и книг в соответствии с требованиями правил корректуры, комплектования и хранения карт и руководств, для плавания на судах гражданских ведомств 9038.
Карты подбирают ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи