Навигационное оборудование
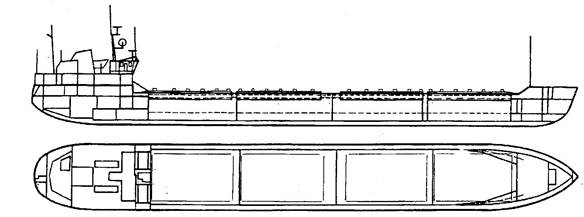
Н=15,2м
 | |||
![]() В=13,4м
В=13,4м
115,9м
РЛС «Печора» РЛС «Миус»
 | |||||||
 | |||||||
| |||||||
| |||||||
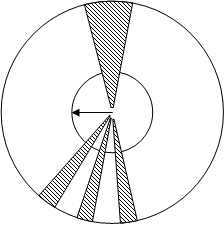
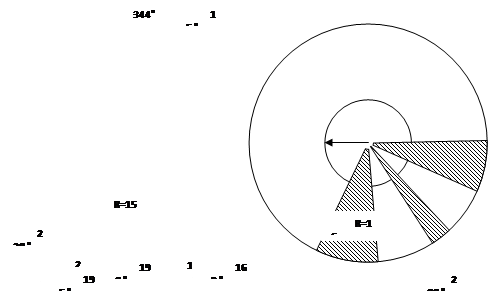
Рисунок 1.4 - Схема теневых секторов и мертвых зон РЛС
Рекомендуем также:
Устройство стартера
Стартер состоит из корпуса с полюсами и обмотки возбуждения, якоря, щёток дистанционного привода, состоящего из реле включения, тяговое реле, рычага привода с вилкой и шестерни привода, вал якоря - вращается в бронзовых втулках, в его пазы уложены несколько секций обмотки из толстой медной ленты. ...
Сборка и проверка топливных
фильтров
Фильтрующие элементы грубой очистки должны быть тщательно промыты, а поврежденные места запаяны. Общая площадь пайки допускается не более 1 см2. Фильтрующие элементы топлива тонкой очистки при ремонте заменяют новыми. Перед сборкой все детали топливных фильтров промывают дизельным топливом и просу ...
Проектирование перехода. Подъём карт
Прежде всего, наносим на карту районы, где действуют особые условия плавания. Наиболее важные сведения из таких правил можно выписать на нерабочем месте карты; здесь же делаем сноски на страницы лоции, где эти правила приведены полностью.
Проводим границы фарватеров и рекомендованные курсы, нанос ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи