Динамика кривошипно-шатунного механизма
![]() ; (8.5)
; (8.5)
![]() . (8.6)
. (8.6)
В результате приведённые массы кривошипа примут вид
![]() ;
; ![]() , (8.7)
, (8.7)
где ![]() - масса шатунной шейки;
- масса шатунной шейки;
![]() - масса рамовой шейки.
- масса рамовой шейки.
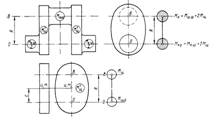
Рис. 8.2 – Кривошип и его динамическая модель
Приведение масс противовеса
Динамическая модель противовеса аналогична модели кривошипа.
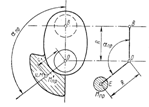
Рис.8.3 – Противовес и его динамическая модель
Приведённая неуравновешенная масса противовеса
![]() , (8.8)
, (8.8)
где![]() - фактическая масса противовеса;
- фактическая масса противовеса;
c1 – расстояние от центра масс противовеса до оси вращения коленвала;
R – радиус кривошипа.
Приведённая масса противовеса ![]() считается расположенной в точке на расстоянии R в сторону центра масс относительно оси коленвала.
считается расположенной в точке на расстоянии R в сторону центра масс относительно оси коленвала.
Динамическая модель КШМ
Динамическую модель КШМ в целом составляют на основе моделей его звеньев, при этом массы сосредоточенные в одноимённых точках суммируют.
1. Приведённая поступательно-движущаяся масса, сосредоточенная в центре поршневого пальца или поперечины крейцкопфа
MS = MП + МШТ + МКР + МШS, (8.9)
где MП – масса комплекта поршня;
МШТ – масса штока;
МКР – масса крейцкопфа;
МШS – ПДМ части шатуна.
Приведённая неуравновешенная вращающаяся масса, сосредоточенная в центре шатунной шейки
MR = МК + МШR, (8.10)
где MК – неуравновешенная вращающаяся часть массы колена;
МШR – НВМ части шатуна;
Обычно для удобства расчётов абсолютные массы заменяют относительными
![]() ;
; ![]() , (8.11)
, (8.11)
где Fп – площадь поршня.
Дело в том, что силы инерции суммируются с давлением газов и в случае использования масс в относительной форме получается одинаковая размерность. Кроме того, для однотипных дизелей значения mS и mR изменяются в узких пределах и их значения приводятся в специальной технической литературе.
В случае необходимости учёта сил тяжести деталей, они определяются по формулам
gR = mRg;
gS = mSg,
где g – ускорение свободного падения, g = 9,81 м/с2.
Лекция 13. 8.2. Силы инерции одного цилиндра
При движении КШМ возникают силы инерции от поступательно-движущихся и вращающихся масс КШМ.
Силы инерции ПДМ (отнесённые к FП)
судовой двигатель термодинамический поршневый
qS = -mSJ. (8.12)
Знак "-" потому что направление сил инерции обычно обратно направлено вектору ускорения.
Зная, что ![]() , получим
, получим
![]() . (8.13)
. (8.13)
В ВМТ (α = 0) ![]() .
.
В НМТ (α = 180) ![]() .
.
Обозначим амплитуды сил инерции первого и второго порядков
PI = - mSRω2 и PII = - mSλ Rω2
Получим
qS = PIcosα+ PIIcos2α, (8.14)
где PIcosα – сила инерции первого порядка ПДМ;
PIIcos2α – сила инерции второго порядка ПДМ.
Сила инерции qS приложена к поршневому пальцу и направлена по оси рабочего цилиндра, её величина и знак зависят от α.
Силу инерции первого порядка ПДМ PIcosα можно представить как проекцию на ось цилиндра некоторого вектора ![]() , направленного по кривошипу от центра коленвала и действующего так, будто он представляет собой центробежную силу инерции массы mS, расположенной в центре шатунной шейки.
, направленного по кривошипу от центра коленвала и действующего так, будто он представляет собой центробежную силу инерции массы mS, расположенной в центре шатунной шейки.

Рис. 8.4 – Векторное изображение сил инерции ПДМ первого порядка
Проекция вектора ![]() на горизонтальную ось представляет фиктивную величину PIsinα, так как в действительности такой величины не существует. В соответствии с этим и сам вектор
на горизонтальную ось представляет фиктивную величину PIsinα, так как в действительности такой величины не существует. В соответствии с этим и сам вектор ![]() , имеющий сходство с центробежной силой также не существует и поэтому носит название фиктивной силы инерции первого порядка.
, имеющий сходство с центробежной силой также не существует и поэтому носит название фиктивной силы инерции первого порядка.
Введение в рассмотрение фиктивных сил инерции, имеющих только одну реальную вертикальную проекцию, является условным приемом, позволяющим упростить расчёты ПДМ.
Вектор фиктивной силы инерции первого порядка можно представить как сумму двух составляющих: действительной силы PIcosα, направленной по оси цилиндра и фиктивной силы PIsinα, направленной перпендикулярно к ней.
Рекомендуем также:
Дефектация деталей с описанием способов возможного восстановления годности
для дальнейшей эксплуатации
Дефекты и износы деталей.
Техническое состояние автомобиля и его износостойкость зависит от конструктивных и производственных недостатков и дефектов, возникающих при эксплуатации.
В процессии эксплуатации наличие этих дефектов приводит к изменению техническое состояние деталей, узлов и агрегатов ...
Силы, действующие на шатунные шейки коленвала
Результирующую силу Rшш, нагруженную шатунную шейку, находят графическим сложением силы S, действующей по оси шатуна, с центробежной силой инерции вращающихся масс шатуна КRш:
Вначале строят полярную диаграмму силы S, так как она является суммирующей двух сил К и Т:
В прямоугольных координат ...
Расчет численности по грузовому хозяйству
Расчет заработной платы приемосдатчиков груза и багажа
Разряд V. Месячный оклад – 4423 руб Контингент – 7 человек.
Сдельный приработок составляет 10% от месячной тарифной ставки или оклада.
(4423*10)/100=442,3 (руб.).
Премия составляет 25% от месячной тарифной ставки или оклада.
(4423*25)/100 ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи