Структура диспетчерских систем
Основной причиной низкой эффективности управления в системе “Автодиспетчер” является недостаточное информационное отражение объекта управления, т.е. управляющая ЭВМ поставлена в такие условия, когда программа управления выбирается по весьма неточному описанию состояния диспетчерского участка. Объясняется это прежде всего тем, что основным источником информации для регулирования движения в системе “Автодиспетчер” являются устройства электрической централизации и автоблокировки. Однако в силу своего назначения - контролировать условия безопасности — эти системы оперируют данными только о состоянии стрелок, светофоров и рельсовых цепей, т.е. стационарных путевых объектов. Для принятия правильного управляющего решения по организации движения диспетчером или ЭВМ данных в системе “Автодиспетчер” явно недостаточно.
Действительно, чтобы принять решение об установке того или иного маршрута, предварительно необходимо оценить ситуацию на станции по многим составляющим технологического процесса. Поскольку конечной целью перевозочного процесса является целенаправленное перемещение подвижных единиц (поездов, вагонов, локомотивов), для организации любого перемещения исходным является точное знание места, назначения и состояния каждой единицы, технологического состояния систем и подразделений, т.е. полное информационное описание объектов управления (моделирование).
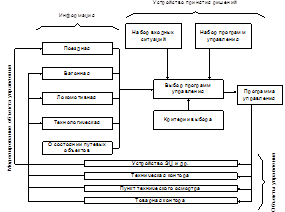
Рис.1.3. Схема информационных моделей системы управления станцией.
Таким образом, при диспетчерском управлении движением на станции или участке в системе должны быть следующие информационные модели (рис. 1.3): поездная, вагонная, локомотивная, технологического состояния станции и состояния путевых объектов (стрелок, светофоров и т.д.). На основе оценки ситуации по этим моделям может быть выбрано управляющее решение, конечно же, более эффективное, чем при использовании информации только о состоянии путевых объектов.
Таким образом, для автоматизации управления движением необходимы технические средства, отражающие состояние станции или участка по всем технологическим составляющим. Исходя из этого, можно решать вопрос и о том, какая система диспетчерского управления лучше — автоматическая или автоматизированная?
Принципиальным различием между ними следует считать способ принятия управляющего решения в системе. В автоматической системе решение выбирает техническое устройство (ЭВМ и т.п.), а в автоматизированной эти функции выполняет человек. Разумеется, в автоматизированной системе и некоторые другие функции могут выполняться человеком, т.е. распределение обязанностей между человеком и техническими средствами может быть различным, но главное — как принимаются решения?
Нетрудно заметить, если на входе решающего устройства состояние объекта управления представлено точно и эта ситуация стандартная (предусмотренная), то в подобных условиях решения техническим устройством будут приниматься оперативнее. В тех же случаях, когда формализованное информационное описание состояния объекта управления в системе не является полным и для снятия неопределенности в ситуации требуется привлечение дополнительных данных из других источников, то управляющие решения, принимаемые человеком, оказываются лучше.
Рекомендуем также:
Выбор и корректирование нормативов режима ТО и ремонта
Цель корректирования – приведение нормативных величин к конкретным условиям работы автомобилей и автотранспортного предприятия.
Корректирование пробега до капитального ремонта (КР).
Lкр = Lкрн · К1 ∙ К2 ∙ К3, км;
где
Lкрн – нормативный пробег до капитального ремонта, Lкрн в км;
К1 ...
Схема контрольно-секционных реле
Схема включения контрольно-секционных реле (КС) образуется после включения начального и конечного (в маневровом маршруте) реле по трассе маршрута от блока начала до блока конца маршрута.
Реле КС устанавливаются: по одному на каждую секцию в блоках СП и УП, по два на каждый приемо-отправочный путь ...
Расчет производственной программы по ТО и ТР ПС
Успешное выполнение плана автомобильных перевозок в значительной степени зависит от технической подготовки ПС. Которая характеризуется коэффициентом технической готовности парка ПС. Исходными данными для составления производственной программы по ТО и ТР являются:
1 Показатели производственной про ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи