Результаты аналитического этапа
Описание сущности концепции:
Предлагается заменить ковшевой рабочий орган на шнековый, представляющий собой двухвальный шнековый питатель, расположенный в кожухе и приводимый во вращение посредством двух высокомоментных гидромоторов. Винтовая линия каждого шнека снабжена резцами расположенными таким образом, что каждый из них работает в режиме полублокированного резания. На винтовой линии установлены скалывающие пластины, предназначенные для перемещения грунта из зоны резания на поверхность шнека. Вращение шнеков в противоположные стороны предназначено для компенсации реактивной составляющей силы резания. Подвижный кожух обеспечивает удержание грунта при его транспортировке вверх до места разгрузки, где в нем имеются соответствующие разгрузочные окна. Грунт после выхода из шнекового рабочего органа через разгрузочные окна попадет на виброжелоба, имеющие возможность устанавливаться таким образом, что грунт может разгружаться одновременно на две стороны. Шнековый рабочий орган закреплен в направляющих ходовой рамы таким образом, что он имеет возможность вертикального, наклонного перемещения. Кроме того, имеются специальные направляющие, которые обеспечиваю поперечное движение рабочего органа. Таким образом, рабочий орган имеет возможность перемещаться вверх и вниз, вправо и влево, и имеет возможность наклоняться в стороны. Продольное перемещение рабочего органа обеспечивается за счет перемещения самой машины. Общая схема машины приведена на рисунках 4.1.
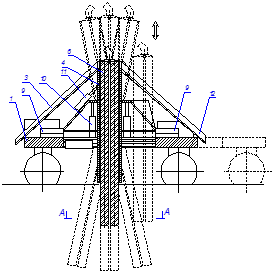
Рисунок 4.1 – Схема машины для землеройных работ:
1 – рама; 2 – ДВС с насосной станцией; 3 – виброжелоб; 4 – направляющий кожух; 5 – движитель; 6 – шнек; 7 – гидромотор; 9 – гидроцилиндр поперечного перемещения шнека; 10 – гидроцилиндр вертикального перемещения шнека; 11 – гидроцилиндр поворота шнека; 12 – телескопический виброжелоб
Достоинства предлагаемой концепции:
1. Высокая производительность;
2. Возможность автоматизации рабочего процесса и полного исключения из него человека;
3. Отсутствие инерционных сил и уравновешенность конструкции;
4. Возможность отрывки котлованов и траншей имеющих наклон боковых стенок;
5. Исключается процесс налипания грунта на поверхность шнеков (самоочистка шнеков)
Предлагается заменить гусеничное ходовое устройство на пневмоволновое ходовое устройство, в котором движение машины осуществляется за счет волнового движения, которое инициируется активными элетментами, встроенными в оболочку газонаполненных гандолл. При движении по слабонесущим грунтам давление в гандоллах уменьшается и площадь опорная соответственно увеличивается. Волновое движение позволяет увеличивать силу сцепления за счет неровностей поверхности.
Последовательность разработки концепции представлена в таблице 4.2.
Исходная проблема:
При работе экскаваторов часто возникает проблема разрушения грунта под опорной поверхностью экскаватора вследствие высокий удельных давлений. Роме тог, экскаватор не может двигаться по неподготовленной для него поверхности – сильно пересеченной местности, так как в этом случае велика вероятность потери силы сцепления движителя с грунтом. Существующие типы ходовых устройств не разрешают противоречий в этой проблеме.
Таблица 4.2 – Последовательность разработки концепции
|
Содержание шага |
Результат шага |
|
Формулировка ключевых задач |
Получение возможности управления удельным давлением в зависимости от несущей способности грунта |
|
Решение ключевых задач |
Предлагается использовать принцип волнового движения, создаваемого с помощью поперечной бегущей волны. Предлагается регулировать удельное давление движителя на грунт за свет изменения давления в оболочке |
|
Обоснование идей |
Волновое движение в природных объектах, волновые передачи и волновые ходовые устройства |
Рекомендуем также:
Расчет допустимой посадочной массы ВС в зависимости от условий аэродрома
посадки
Исходные данные
Наэр = 150 м; tнв = - 10оС; уклон: +1%; ветер: 7 м/с встр.; РПД = 2500 м.
Расчет
Согласно графику 6.15.1mmaxдоппос = 79500 кг;
Согласно графику 6.15.2mmaxдоппос = 82200 кг;
Согласно графику 6.15.4 mmaxдоппос = 85200 кг;
Исходя из найденных значений масс можно сделать следующи ...
Применяемые способы восстановления коленчатого вала
Основной дефект коленчатых валов — износ коренных и шатунных шеек. Износ шеек устраняют шлифованием их под ремонтный размер. Для шлифования валов служат станки ЗА423 или ЗВ423. Шейки вала шлифуют электрокорундовыми кругами на керамической связке зернистостью 16 .60 мкм, твердостью СМ2, CI, С2, СТ1 ...
Выбор материалов и допускаемых напряжений
Так как крутящий момент ведомого вала равняется Т2=140[Нм], то целесообразнее всего цементация стали.
Для изготовления зубчатых колес выбираем сталь марки 25ХГТ. После термообработки, твердость шестерни составит около 610 НВ, а твердость колеса - около 570 НВ.
Допускаемые контактные напряжения: ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи