Вагон-лаборатория для испытания контактной сети
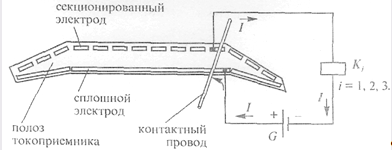
Рисунок 1.3 -Электронный датчик

Рисунок 1.4- ВИКС-ЦЭ
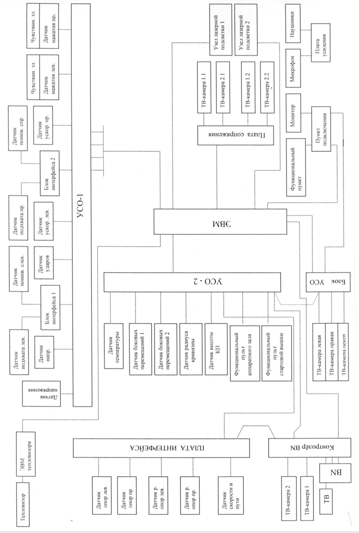
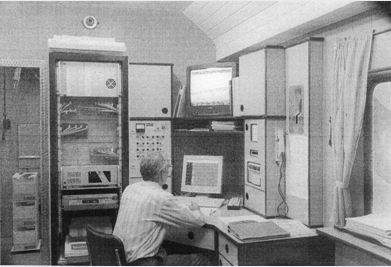
Рисунок 1.6- Стойка аппаратуры ИВК и рабочее место оператора
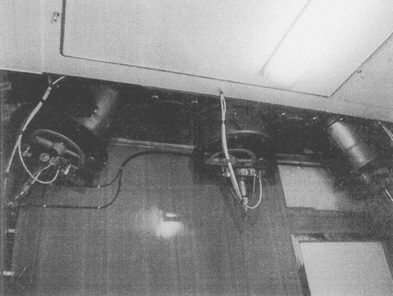
Рисунок 1.7-Цифровые линейные телекамеры стереотелевизионной системы
ИВК показанный на рисунке 1.5, 1.6 обеспечивает:
– бесконтактное измерение высоты КП в диапазоне от 5500 до 6900 мм с погрешностью не более ±10 мм;
– бесконтактное измерение положения КП (зигзаг и вынос) в плане при 1…4 проводах в диапазоне ±700 мм с погрешностью не более ±5 мм;
– контроль понижения КП на воздушных стрелках, положение по высоте фиксаторов и отходящих анкеровочных ветвей относительно основного КП;
– измерение усилия нажатия токоприемника на КП в диапазоне 0…400 Н с погрешностью не более ±10 Н;
– регистрацию ударов по токоприемнику в диапазоне ускорений 0…50 g с погрешностью не более ±0,5 g;
– регистрацию отрывов токоприемника от КП по мгновенному падению измеряемого напряжения контактной сети на время не менее 30 мс;
– измерение пройденного вагоном-лабораторией расстояния;
– автоматическую отметку опор;
– автоматическую отметку ключевых (реперных) опор;
– измерение наклона кузова вагона относительно букс колесных пар;
– измерение скорости движения вагона-лаборатории в диапазоне 1…200 км/ч с приведенной погрешностью не более ±1%;
– измерение радиуса кривизны пути;
– измерение напряжения в контактной сети в диапазоне 2,7…4,0 кВ постоянного тока с погрешностью не более ±10 В и в диапазоне 21…29 кВ переменного тока частотой 50 Гц с погрешностью не более ±100 В;
– измерение температуры наружного воздуха в диапазоне – 50… + 50 0С с погрешностью не более ±1 0С;
– отображение результатов измерений на экран дисплея персональной ЭВМ рабочего места оператора ВИКС в графическом виде в реальном масштабе времени;
– запись результатов измерений на жесткий диск персональной ЭВМ и накопитель информации на магнитном диске большой емкости типа ZIP с формированием архива измеренных параметров контактной сети;
– диалог оператора с ЭВМ без прерывания процессов приема, обработки, отображения и архивации результатов измерений;
– привязку результатов измерений к показаниям датчика скорости и пройденного пути, точкам фиксации контактного провода;
– автоматизированное самодиагностирование неисправностей ИВК;
– фиксацию отклонений измеряемых параметров контактной сети с ведением протокола;
– ввод визуальных показателей (несоответствие положения фиксатора, несоответствие расстояния грузов компенсатора от земли до ролика температуре воздуха, обрыв жил проводов, разбитый изолятор, наклон опоры, отсутствие заземления опоры, отсутствие нумерации опор, обрыв струнки и т. п.);
– расчет "балльной оценки" состояния контролируемого участка контактной сети на основе результатов измерений и визуальных наблюдений;
– телевизионное наблюдение за контактной сетью с выводом измеряемых показателей на экран телевизора и записью на видеомагнитофон.
Бесконтактные измерения высоты подвески и положения в плане КП осуществляется с помощью стереотелевизионной системы, использующей три цифровые линейные телекамеры показанные на рисунке 1.7 с электронными диафрагмами и встроенными сигнальными микропроцессорами. Телекамеры защищены от воздействий внешней среды вращающимися иллюминаторами, а в нерабочем положении – геометрической заслонкой с гидроприводом внутри вагона. Измерения параметров обеспечивается при любой погоде.
На рисунке 1.8 приведен (передний план, в центре) электромеханический (на базе вращающегося трансформатора) датчик высоты контактного провода, используется под искусственными сооружениями и как резервный.
Рисунок 1.8-Электромеханический датчик высоты контактного провода
Измерения силы нажатия токоприёмника на контактный провод обеспечивается оптоволоконными датчиками нажатия, использующие тензочувствительные оптические элементы, рисунок 1.9, датчики, размещённые под каретками. По своему принципу действия датчики нажатия обеспечивают оптическую высоковольтную развязку аппаратуры внутри вагона от контактного провода. В результате модификации датчиков радикально уменьшена их масса и аэродинамическое сопротивление, что повысило точность измерений нажатия.
Рекомендуем также:
Установление рабочего времени
и режимов работы депо и определение фондов рабочего времени
Под режимом работы понимается определенное чередование времени работы и отдыха.
Для проектируемого депо выберем IV вариант режима работы отделения: ежедневная односменная рабочая неделя продолжительность смены определим по формуле ниже. Для рабочих – скользящий график двух дней работы и двух дней ...
Проектирование дополнительных устройств на кривых малого радиуса
Проектирование переходной кривой
Переходные кривые на автомобильных дорогах проектируют при радиусах менее 2000 м независимо от категории дороги. Рекомендуется следующая последовательность проектирования переходных кривых:
1. По заданной величине угла поворота (α) и радиуса кривой (R) опред ...
Определение времени восстановления
детали
В данном курсовом проекте по заданию необходимо восстановить поверхности 1, 2,3 и 4 тягового хомута автосцепки, износ которых составил 3 мм, 2 мм, 2 мм и 3 мм соответственно. Восстановление необходимо провести ручной дуговой наплавкой. Для определения времени восстановления изношенных поверхностей ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи