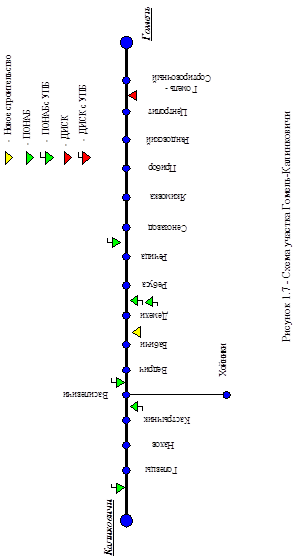
Разработка структуры системы автоматического контроля подвижного состава на участке Гомель – Калинковичи
Анализ существующих систем автоматического контроля подвижного состава показывает, что основным направлением развития этих систем является построение единой централизованной сети контроля подвижного состава с микропроцессорным управлением. Передача данных в таких сетях осуществляется по стандартным каналам передачи данных с использованием модемов. В качестве метода коммутации применяется пакетная коммутация.
Основным достоинством микропроцессорной системы управления является гибкость и приспосабливаемость к различным условиям. Так, в микропроцессорной системе существует возможность оперативного изменения рабочей программы, а следовательно, методов измерений и анализа измеренных данных, методов контроля передаваемых сообщений. К достоинствам таких систем также относится возможность оперативного внедрения дополнительных функций аппаратуры.
Рекомендуем также:
Тепловозы в СССР
В 1924 г. в Ленинграде был создан магистральный тепловоз ГЭ1 (Щэл1) системы Я. М. Гаккеля мощностью 735 кВт (1000 л. с.) с электрической передачей. В ноябре 1924 г. тепловоз вышел на железнодорожную магистраль и в январе 1925 г. прибыл в Москву. Одновременно в Москве появился тепловоз с электричес ...
Выбор метода технического обслуживания устройств и организации труда в
цехах и на участках
На основании исходных данных, технической оснащённости дистанции, назначения и размещения цехов, местных условий следует выбрать метод обслуживания устройств СЦБ.
Внедрение рациональных методов технического обслуживания устройств является одним из условий обеспечения роста производительности труд ...
Устройство тормозной системы Урал 4320
Тормозная система предназначена для снижения скорости движения автомобиля, вплоть до остановки и удержания его неподвижным, с уклоном.
В автомобиле Урал 4320 имеются две тормозные системы – рабочая и стояночная.
Рабочая тормозная система служит для быстрого снижения скорости автомобиля вплоть до ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи