Расчет динамической характеристики автомобиля
Динамическим фактором автомобиля D называют отношение разности силы тяги на ведущих колесах автомобиля![]() и силы сопротивления воздуха
и силы сопротивления воздуха ![]() к полному весу автомобиля G.
к полному весу автомобиля G.
 ,
, ![]()
Значения динамического фактора автомобиля изменяются в зависимости от номера включенной передачи в КПП и от скорости движения автомобиля. Динамический фактор автомобиля при включении различных передач КПП определяется по формуле-20
![]() ,
, ![]() (20)
(20)
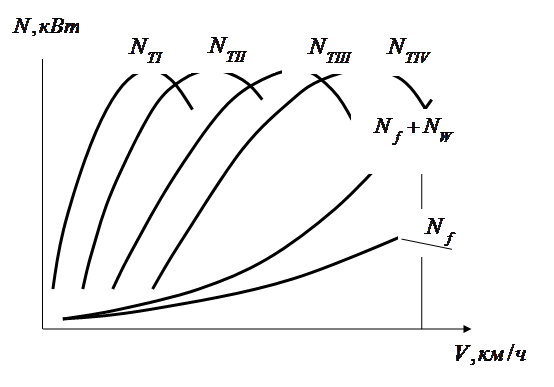
Рисунок 4 - График мощностного баланса проектируемого автомобиля.
Значения сил РTi для различных передач КПП и скоростей движения автомобиля приведены в таблице 4, значения сил PWi для различных скоростей движения автомобиля можно определить по формуле-21
![]()
 , Н (21)
, Н (21)
Величина динамического фактора ограничивается условиями сцепления ведущих колес автомобиля с дорогой. Динамический фактор по условиям сцепления колес с дорогой может быть определён по формуле-22 для заднеприводных автомобилей
![]() (22)
(22)
где ![]() - коэффициент сцепления шин с дорогой; принимается
- коэффициент сцепления шин с дорогой; принимается ![]() = 0,2…0,4 (соответствует движению автомобиля по укатанному снегу).
= 0,2…0,4 (соответствует движению автомобиля по укатанному снегу).
Принимаем ![]() = 0,2.
= 0,2.
![]() ,
, ![]() - коэффициенты перераспределения нормальных реакций для передней-1 и задних-2 осей; для рассматриваемого случая принимаются
- коэффициенты перераспределения нормальных реакций для передней-1 и задних-2 осей; для рассматриваемого случая принимаются
![]() =0,8…0,9;
=0,8…0,9; ![]() =1,1…1,2.
=1,1…1,2.
Принимаем ![]() =1,2
=1,2
![]() ,
,![]() - часть полного веса автомобиля, приходящаяся на переднюю-1 или задние-2 оси, Н; см. п.1.2.3 (
- часть полного веса автомобиля, приходящаяся на переднюю-1 или задние-2 оси, Н; см. п.1.2.3 (![]() = 49049Н)
= 49049Н)
Используя формулы 20 и 21, определяем значения динамического фактора автомобиля для 5…6 скоростей его движения при включении каждой передачи КПП, и строим динамическую характеристику автомобиля на свободном поле первого листа графической части проекта. Здесь же наносим предварительно подсчитанный по одной из формул 22 динамический фактор по условию сцепления колес с дорогой и сделать вывод о возможности движения автомобиля без буксования по укатанному снегу. Расчет динамического фактора автомобиля представляем в виде таблицы 8.
Таблица 8 - Расчет динамического фактора проектируемого автомобиля.
|
Передача КПП |
Скорость движения автомобиля, V, км/ч (см. табл.5) |
Сила тяги на ведущих колесах автомобиля, PT I, H |
Сила сопротивления воздуха, PW I, H |
Разность сил (PT I - PW I), Н |
Динамический фактор автомобиля, Di, Н/Н |
|
I |
2,6 |
26879,2 |
1,07 |
26878,13 |
0,384 |
|
5,2 |
28949,7 |
4,2 |
28945,5 |
0,413 | |
|
7,8 |
29631,6 |
9,6 |
29622,0 |
0,423 | |
|
10,3 |
28949,7 |
16,8 |
28932,9 |
0,413 | |
|
13 |
26966,0 |
26,8 |
26939,2 |
0,384 | |
|
15,5 |
23692,8 |
38,1 |
23654,7 |
0,338 | |
|
II |
4,9 |
14279,6 |
3,8 |
14275,8 |
0, 204 |
|
9,7 |
15379,5 |
15 |
15364,5 |
0,220 | |
|
14,6 |
15741,0 |
33,8 |
15707,2 |
0,224 | |
|
19,5 |
15379,5 |
60,3 |
15319,2 |
0,219 | |
|
24,3 |
14325,7 |
93,6 |
14232,1 |
0, 203 | |
|
29,2 |
12586,8 |
135,11 |
12451,7 |
0,178 | |
|
III |
8,7 |
7978,2 |
12 |
7966,2 |
0,114 |
|
17,4 |
8592,8 |
48 |
8544,8 |
0,122 | |
|
26,1 |
8795,2 |
107 |
8688,2 |
0,124 | |
|
34,8 |
8592,8 |
191 |
8401,8 |
0,120 | |
|
43,5 |
8004,0 |
300 |
7704,0 |
0,110 | |
|
52,2 |
7032,5 |
431 |
6601,5 |
0,100 | |
|
IV |
16,5 |
4162,6 |
43 |
4119,6 |
0,058 |
|
33 |
4483,2 |
172,6 |
4310,6 |
0,061 | |
|
49,5 |
4588,8 |
388,3 |
4200,5 |
0,060 | |
|
66 |
4483,2 |
690,3 |
3792,9 |
0,054 | |
|
85 |
4176,0 |
1144,9 |
3031,1 |
0,043 | |
|
99 |
3669,12 |
1553,1 |
2116,02 |
0,030 |
Рекомендуем также:
Ограждение места производства основных работ в окно
Места путевых работ с нарушением целостности или устойчивости пути или сооружений, а также препятствия на пути или около него в пределах габарита приближения строения следует ограждать путевыми сигналами.
Требованиями инструкции (5) запрещено приступать к работам до ограждения сигналами мест прои ...
Техническая характеристика
работы сортировочной станции
На сортировочных станциях распределяют вагоны по пунктам назначения и формируют из этих вагонов поезда следующий на дальние расстояния без переработки пути. Сортировочные станции бывают:
1. односторонние – имеют одну систему сортировочных устройств для переработки вагонов.
2. двусторонние – имею ...
Расчет межпоездных
интервалов
Межпоездным интервалом называется минимальное время, через которое следуют попутные поезда при определенных расчетных условиях в пакете по перегонам на участке, оборудованным автоблокировкой с блокпостами.
При разграничении поездов на 3 блок – участка.
п
...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи