Гидроусилитель золотникового типа
Гидроусилители золотникового типа получили наибольшее распространение. Они просты по конструкции, разгружены от аксиальных статических сил давления жидкости, легко управляемы, имеют высокий КПД и обеспечивают достижение значительных коэффициентов усиления по мощности.
Схема следящего гидроусилителя золотникового типа с гидродвигателем прямолинейного движения и жесткой рычажной обратной связью представлена на рис.4.
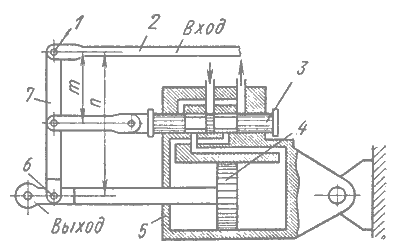
Рис.4. Схем гидроусилителя золотникового типа с обратной связью:
1 - шарнир; 2 - тяга; 3 - золотник распределителя; 4 - поршень;
5 - корпус силового цилиндра; 6 - шарнир; 7 - дифференциальный рычаг
Этот гидроусилитель состоит в основном из тех же элементов что и рассмотренный выше усилитель рулевого привода автомобиля. При перемещении тяги 2, связанной с ручкой управления, перемещается шарнир 1 дифференциального рычага 7 обратной связи, с которым вязаны штоки силового цилиндра 5 и золотника распределителя 3. Так как силы, противодействующие смещению золотника распределителя, значительно меньше соответствующих сил, действующих в системе силового поршня 4, то шарнир 6 может рассматриваться в начале движения тяги 2 как неподвижный, ввиду чего движение его вызовет через рычаг 7 смещение плунжера золотника распределителя 3. В результате при смещении золотника из нейтрального положения, жидкость поступит в соответствующую полость цилиндра 5, что вызовет перемещение поршня 4, а следовательно, и шарнира 6, связанного с "выходом". При этом выходное звено сместится пропорционально перемещению тяги 2.
После того как движение тяги 2 будет прекращено, продолжающийся выдвигаться поршень 4 сообщит через рычаг 7 обратной связи плунжеру золотника распределителя 3 перемещение, противоположное тому, которое он получал до этого при смещении тяги 2 управления. Так как при этом расходные окна золотника будут в результате обратного движения плунжера постепенно прикрываться, количество жидкости, поступающей в цилиндр 5, уменьшится, вследствие чего скорость его поршня будет уменьшаться до тех пор, пока плунжер золотника не придет в положение, в котором окна полностью перекроются, при этом скорость станет равной нулю.
При перемещении плунжера золотника в противоположную строну движение всех элементов регулирующего устройства будет происходить в обратном направлении.
В действительности отдельных этапов движения "входа" и "выхода" рассматриваемого следящего привода с жесткой обратной связью не существует, и оба движения протекают практически одновременно, т.е. имеет место не ступенчатое, а непрерывное "слежение" исполнительным механизмом за перемещением "входа".
Рекомендуем также:
Технико-экономическое обоснование
Работоспособность подвижного состава обеспечивают различные предприятия автомобильного транспорта, предназначенные для технического обслуживания, ремонта, хранения автомобилей и обеспечения их эксплуатационными материалами.
Высокие трудовые и материальные затраты на поддержание подвижного состава ...
Патентно-информационный обзор
Механизм, предназначенный для непосредственного создания и изменения искусственного сопротивления движению автомобиля, называется тормозным.
Тормозные механизмы по форме вращающихся элементов делятся на барабанные и дисковые, встречаются также камерные тормозные механизмы.
Фрикционный тормоз, в ...
Расчет показателей
графика движения поездов
Составленный график движения поездов характеризуется количественными и качественными показателями.
Количественные показатели:
Размеры движения пассажирских и грузовых поездов, а так же число проложенных «ниток» с учетом необходимого резерва;
Размеры погрузки и выгрузки, которые могут быть освое ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи