Технология комплексного оперативного планирования работы локомотивов грузового движения в условиях автоматизации
Задача комплексного оперативного планирования работы локомотивов грузового движения может быть сформулирована следующим образом.
Имеется обслуживаемый закрепленными сериями локомотивов участок обращения. Требуется среди множества возможных взаимоувязанных вариантов планов работы локомотивов на периоды планирования — суточный С = {С1, С2, ., Сп}, текущий Т = {Т1, Т2, ., Тп} и на ближайшие три (четыре) часа (на период окончательного плана-задания) О = {О1, О2, ., Оп} — найти такой набор вариантов (С*, T*, O*), при котором минимизируются за суточный период планирования (Тг) эксплуатационные расходы, зависящие от тягового обеспечения ЭТг(C, T, O):
ЭТг(С*, T*, O*) min Э(C, T, O). (1)
При поиске рациональных вариантов планирования работы тяговых средств учитываются лишь изменяющиеся группы затрат, а именно на содержание эксплуатируемого парка локомотивов, то есть расходы, связанные с их простоями по пунктам оборота и перецепки, резервными пробегами и выполнением технического обслуживания ТО-2, а также расходы, связанные с возникающими дополнительными простоями готовых составов поездов из-за несвоевременной выдачи локомотивов для их вывоза.
Учитывая большую размерность задачи комплексного оперативного планирования работы локомотивов грузового движения, для ее решения необходимо применять метод декомпозиции, использующий эвристические соображения для представления общей задачи в виде определенной последовательности трех частных подзадач. Иными словами, данную задачу следует решать методом последовательной покоординатной минимизации в соответствии с иерархией, приведенной на рис. 2.1.
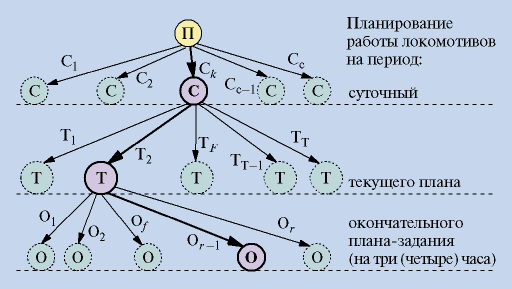
Рис. 2.1 Схема выбора рационального варианта плана работы локомотивов грузового движения при комплексном его составлении
Рекомендуем также:
Тепловой рачет двигателя
Тепловой расчет является начальный этапом всех работ, связанных с проектированием двигателя. При проведении расчетов необходимо сравнить данные отдельных его этапов с соответствующими параметрами существующих двигателей. Если обнаружится ошибка – проверить поворотным расчетом или изменить численны ...
Подготовка колеса к балансировке
Перед балансировкой следует удалить все грузики. Колесо должно быть очищено от грязи и камней, застрявших в протекторе (в идеале – вымыто). При подготовке к балансировке на стационарном стенде особенно тщательно должна быть очищена плоскость колеса, прилегающая к ступице. После определения места у ...
Расчет ускорений автомобиля
Динамический фактор автомобиля соответствует дорожному сопротивлению, характеризуемому коэффициентом сопротивления дороги Ψ, которое автомобиль способен преодолеть на данной передаче с заданной постоянной скоростью. В случае, если величина динамического фактора автомобиля отличается от коэффи ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи