Способ трех пусков с пробными массами
Данный способ применяют в тех случаях, когда отметку фазы получить нельзя. При этом используют виброизмерительную аппаратуру для определения амплитуды колебаний корпуса или бесконтактные датчики, измеряющие перемещения ротора. При первом запуске определяем амплитуду ![]() вибрации с начальным (исходным) дисбалансом ротора. Затем в плоскости коррекции устанавливаем пробную массу
вибрации с начальным (исходным) дисбалансом ротора. Затем в плоскости коррекции устанавливаем пробную массу ![]() , запускаем ротор и определяем новую амплитуду колебаний корпуса. Эту операцию повторяем еще 2 раза, устанавливая
, запускаем ротор и определяем новую амплитуду колебаний корпуса. Эту операцию повторяем еще 2 раза, устанавливая ![]() на одном и том же радиусе, но под различными углами. Полученным трем амплитудам присваиваются номера в следующей зависимости: A1>A2, A1>A3. После этого строим векторную диаграмму дисбалансов (рисунок 2) .
на одном и том же радиусе, но под различными углами. Полученным трем амплитудам присваиваются номера в следующей зависимости: A1>A2, A1>A3. После этого строим векторную диаграмму дисбалансов (рисунок 2) .
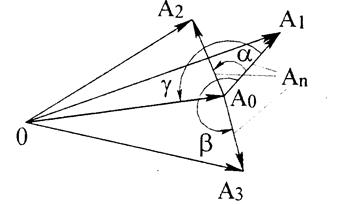
Рисунок 2 - Векторная диаграмма дисбалансов при способе трех пусков
Получаем систему треугольников, в каждом из которых неизвестна одна сторона Ап, но стороны равны между собой и пропорциональны![]() . На основании теоремы косинусов:
. На основании теоремы косинусов:
А12=А02+Ап2 – 2А0Апcos![]() ; (1)
; (1)
A22=А02+Ап2 – 2А0Апcos(![]() –
– ![]() ); (2)
); (2)
A32=А02+Ап2 – 2А0Апcos(![]() -
- ![]() ). (3)
). (3)
где ![]() - угол между первым и вторым положением пробной массы;
- угол между первым и вторым положением пробной массы;
![]() - угол между первым и третьим положением пробной массы;
- угол между первым и третьим положением пробной массы;
Угловое положение ![]() для постановки корректирующей массы относительно положения первой пробной массы (в том же направлении, по которому отмечают,
для постановки корректирующей массы относительно положения первой пробной массы (в том же направлении, по которому отмечают, ![]() и
и ![]() ) определяем по зависимости полученной из первых трех выражений:
) определяем по зависимости полученной из первых трех выражений:
 ; (4)
; (4)
Величину Аn находим после подстановки значения ![]() в одно из тех же выражений, или из их разности:
в одно из тех же выражений, или из их разности:
 ; (5)
; (5)
на основании чего находим и величину корректирующей массы из соотношения
 . (6)
. (6)
Если балансировку выполнять удалением массы ![]() , то место коррекции находят под углом
, то место коррекции находят под углом ![]() + 180°.
+ 180°.
Рекомендуем также:
Выбор пути на морских участках
Выбор пути выполняется на основании анализа всех условий плавания с учётом осадки судна, его мореходных качеств и эксплуатационных требований.
Выбираемый путь должен удовлетворять правовым ограничениям, обеспечивать навигационную безопасность плавания и предотвращения угрозы столкновения с другим ...
Расчет передаточного числа рычажной передачи вагона
Передаточным числом рычажной передачи называется отношение теоретической величины суммы сил нажатия тормозных колодок вагона к силе давления сжатого воздуха на поршень тормозного цилиндра
n = (Kдоп·mв)/(Ршт·ηрп),(7.1)
где Ршт - усилие по штоку тормозного цилиндра, кН;
ηрп - КПД рычажн ...
Судовые
системы
Это совокупность трубопроводов с механизмами, аппаратами, приборами, устройствами и ёмкостями. Они предназначены для перемещения жидкостей, воздуха или газов в целях обеспечения нормальной эксплуатации судна.
На торговых судах в состав судовых систем входит: трюмные системы, балластные системы, ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи