Исследование движения механизма под действием заданных сил
Уравнение движения механизма с одной степенью свободы в интегральной форме записывается следующим образом:
![]() , (5.1)
, (5.1)
где n –число подвижных звеньев;
![]() -работа внешних сил, приложенных к
-работа внешних сил, приложенных к ![]() - му (подвижному) звену;
- му (подвижному) звену;
![]() кинетическая энергия
кинетическая энергия ![]() - го звена в текущий и начальный момент времени ;
- го звена в текущий и начальный момент времени ;
Для упрощения решения уравнения и исследования движения механизма при расчетах реального механизма заменяют динамической моделью, представляющей собой двухзвенный одно-массовый механизм, состоящий из стойки и подвижного звена.
Будем использовать динамическую модель механизма, которая характеризуется приведенным суммарным моментом инерции (JSпр) и приведенным суммарным моментом сил (МSпр) [1] . То есть в основу модели положено звено приведения, обладающее приведенным моментом инерции (JSпр) и совершающее вращательное движение под действием приложенного к нему приведенного к оси вращения моменту сил (МSпр) (Рис.5)[2].
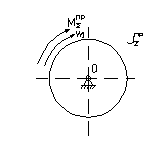
Рис. 5.1
Рекомендуем также:
Классификация
ДВС
Согласно отраслевому стандарту Д.В.С классифицируются по следующим признакам:
1. По мощности: маломощные ( до 74 кВт), средней мощности ( от 74 кВт до 736 кВт), сверхмощные ( от 736 кВт).
2. По степени форсирования: показателем форсировки двигателя является удельная поршневая мощность. По степен ...
Восстановление автомобильных шин
Современная автомобильная шина представляет собой эластичную резинокордную оболочку сложной конструкции, монтируемую на обод колеса, наполняемую сжатым воздухом и предназначенную для обеспечения надежной передачи тяговых и тормозных сил, способности устойчивого прямолинейного движения, малого нагр ...
Крепление двигателя на раме
Несмотря на хорошую уравновешенность современных автомобильных двигателей, во время их работы все же возникают вибрации, которые не должны передаваться на раму. Поэтому крепление (подвеска) двигателя должно быть таким, чтобы уменьшить передачу вибраций на раму автомобиля и предотвратить появление ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи