Принцип работы лазерного регистратора колебаний
В основу работы датчика, показанного на рисунке 5.6, положен принцип оптической триангуляции. Излучение полупроводникового лазера 1 фокусируется объективом 2 на объекте 6. Рассеянное на объекте излучение объективом 3 собирается на CCD-линейке 4. Процессор сигналов 5 рассчитывает расстояние до объекта по положению изображения светового пятна на линейке 4. Такие датчики выпускает фирма: ЗАО "Электронные технологии и метрологические системы" Россия, 124482, г. Москва, г. Зеленоград, Савёлкинский проезд, д. 4, офис 2101
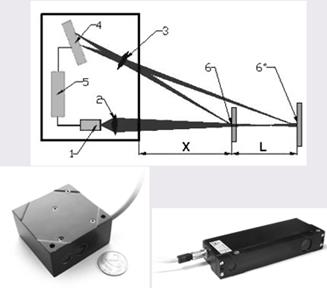
Рисунок 5.6- Принцип работы лазерного регистратора колебаний и его внешний вид
Рекомендуем также:
Основные узлы и модули комплекса КТСМ-01
Периферийный контроллер ПК-02
В качестве базового устройства в комплексе контроля состояния подвижного состава планируется использовать периферийный контроллер ПК-02. Контроллер представляет собой устройство с программным управлением (микропроцессорную систему), что позволяет расширять область ег ...
Разработка оснастки по ремонту детали
Любое проектируемое приспособление должно максимально облегчить ручной труд, быть надежным в работе, повысить производительность труда с целью его окупаемости.
Рассухариватель клапанов (рисунок 2) состоит из плиты основания, на которой установлены две стойки выполненные из круга, соединенные трав ...
Определение потребности машин напольного транспорта по доставке груза на РТК
Определение потребности машин напольного транспорта производится по формуле
NNT = Qгп / Tc Пэ (1) ,
где Qгп - среднесуточный грузопоток, т/сутки ;
Тс=16 часов (2-х сменный) – время работы машин в сутки, ч;
Пэ – производительность, т/ч.
Производительность определяется по формуле
Пэ = 60 · ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи