Оценка адекватности проведенной балансировки
Для оценки адекватности проведенной балансировки определим относительные погрешности в горизонтальной и вертикальной плоскостях .
Погрешности определяются по следующим формулам:
 (7)
(7)
Результаты расчета погрешностей выбранной математической модели представлены в таблице 6.
Таблица 6 –
Погрешности балансировки
|
Плоскость коррекции |
γ% |
mk% |
|
01 |
4,00 |
14,04 |
|
02 |
13,0 |
80,065 |
Вывод: Различие корректирующей массы вызвано погрешностью измерения, т.к. приемник установлен на магните и при большой частоте вращения ротора возникает “плавание” датчика.
Приложение
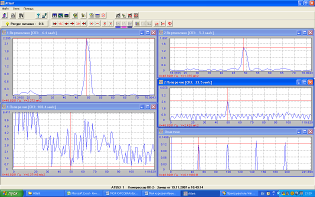
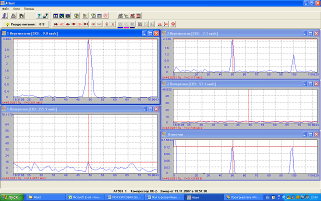
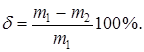
Рисунок 3 – Величина дисбалансов на определённой частоте, определённого вибросигнала
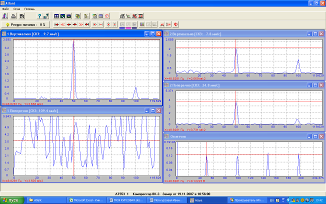
Рисунок 4 – Величина дисбалансов на определённой частоте, определённого вибросигнала
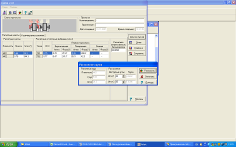
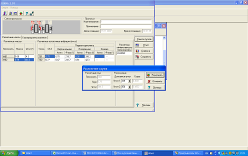
Рисунок 5 – Разложение масс ![]() и
и ![]() грузов
грузов
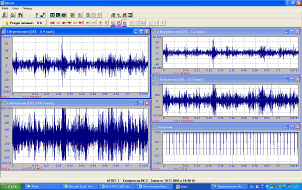
Рисунок 6 – Диаграмма сигналов и спектров
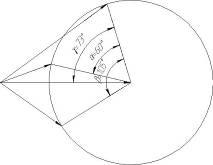
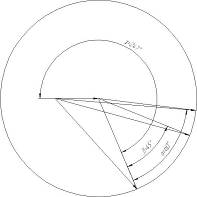
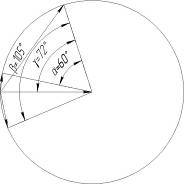
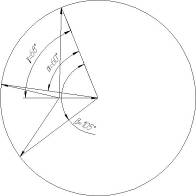
Рисунок 7 – Векторная диаграмма дисбалансов:
А) Первая плоскость, направление вертикальное;
Б) Вторая плоскость, направление горизонтальное.
Рекомендуем также:
Определение общей площади роботизированного складского комплекса
Расчеты складской площади производится по формуле
Sобщ = Sосн + Sсл + Sконстр ,
где Sосн – основная площадь склада;
Sсл – служебная площадь (конструктора, бытовые помещения);
Sконстр - конструктивная площадь (лестничные клетки, лифты, внутренние стены и т.п.);
Sосн = Sхр + Sтехн + Sвсп + Sрез ...
Определение значений угловой скорости и ускорения начального звена
Мгновенное значение угловой скорости звена приведения находим по формуле:
; (5.12)
ускорение:
(5.13)
Значения угловой скорости и ускорения начального звена в зависимости от угла поворота ведущего звена приведены в таблице 5.4.
Таблица 5.4
232
0
215
58,6
...
Компонентно-структурный анализ
При проведении компонентного анализа выполняется выделение элементов (операций) верхнего (первого) иерархического уровня и элементов надсистемы, с которыми взаимодействует техническая система (технологический процесс). Здесь же может быть определен состав элементов (операций) верхнего иерархическо ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи