Кинематическое исследование планетарного механизма
Планетарные механизмы – это сложные соосные зубчатые механизмы, в составе которых имеются зубчатые колеса, оси которых перемещаются в пространстве. Основными звеньями ПЗП являются центральные зубчатые колеса, оси которых неподвижны, сателлиты – зубчатые колеса с перемещаемыми осями вращения и водило – звено, в котором установлены оси сателлитов.
Проектирование планетарных механизмов начинают с выбора схемы, так как одно и то же заданное передаточное отношение можно обеспечить различными схемами механизмов, отличающимися КПД, габаритами, весами и другими условиями синтеза.
Структурный анализ механизма
Исследуем механизм, у которого заданы: передаточное отношение: U1H=24, количество сателлитов К=3
Заданный планетарный механизм можно разделить на две части рядовый зубчатый механизм, состоящий из колеса Z1=15 и Z2=23. Передаточное отношение U12=Z1/Z2=1.53 тогда передаточное отношение планетарного механизма U3H=U3H/U12=24/1.53=15.6; В соответствии с заданным передаточным отношением (U=15.6) была выбрана схема (рис.8.1).
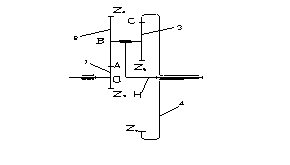
Рис8.1.
Охарактерезуем кинематические пары механизма:
1-2-НКП, вращательное, 5кл.
2-3-НКП, вращательное, 5кл.
3-4-НКП, вращательное, 5кл.
По формуле Чебышева определим степень подвижности механизма и докажем, что это действительно планетарный, а не дифференциальный (с 2-я степенями подвижности) механизм.
W=3n-2P5-p4; где (7.1)
n-число подвижных звеньев, n=3
P5-число КП 5-го класс, Р5=4
Р4- число КП 4-го класс, Р4=0
W=3*3-2*4=1
Рекомендуем также:
Описание генерального плана
Основными показателями генерального плана являются площадь и плотность застройки, коэффициент озеленения предприятия. Площадь застройки определялась как сумма площадей, занятых зданиями и сооружениями всех видов, включая открытые стоянки автомобилей АТП. В площадь застройки не включалась площадь з ...
Перспективы развития контейнерных перевозок
Новосибирск - географический центр России. Город расположен на пересечении основных транспортных коммуникаций: запад - восток, север - юг. Через него проходит Транссибирская железнодорожная магистраль. Его пересекают голубые полосы рек Обь-Иртышского бассейна. Есть великолепная возможность выхода ...
Результаты решения тяговой задачи и их анализ
Результаты решения тяговой задачи представлены в виде графиков на рис.3.1., где приведены скорость поезда V, проходимый поездом путь S, потребляемый электровозом ток iэ, расход энергии на движение поезда W и профиль пути, представленный как разность высот между точкой отправления и текущим положен ...
Навигация
- Главная
- Сигнализации на железных дорогах
- Двигатели внутреннего сгорания
- Виды гидроусилителей
- Ремонт автомобильных шин
- Грузовые вагоны нового поколения
- Роль грузового автотранспорта
- Статьи